



Sonami’s signature instrument, the lady’s glove, is fitted with a vast array of sensors which track the slightest motion of her enigmatic dance: with it Sonami can create performances where her movements can shape the music and in some instances visual environments. The lady’s glove has become a fine instrument which challenges notions of technology and virtuosity.
A brief history
“I built my first gloves in 1991 for a performance at the Ars Electronica Festival (Linz) with Paul DeMarinis, entitled “Mechanization Takes Command.” These were a pair of rubber kitchen gloves (the perfect housewife’s tool) with five Hall effect transducers glued at the tip of the fingers and a magnet on the right hand (see pictures below): by touching the fingers on the magnet, varying voltages were fed to a Forth board and converted to MIDI signals. These signals controlled various synthesizers and samplers. Paul was using a Power Glove to control speech synthesis. While I was intent on finding a more fluid way to perform with the computer, this first glove was also somewhat of a joke, a response to the heavy masculine apparel used in virtual reality systems.
Following was a white arm-length left glove with these same sensors, but with the magnet on the inside of the thumb, and a set of microswitches on the top of the fingers. The right hand was thus free to manipulate the mixing board. The wires were hidden inside the glove, I wanted to make it look magical (but yes, there was a big bundle coming out at some point, but for a very short distance, one could suspend any rational explanation…)
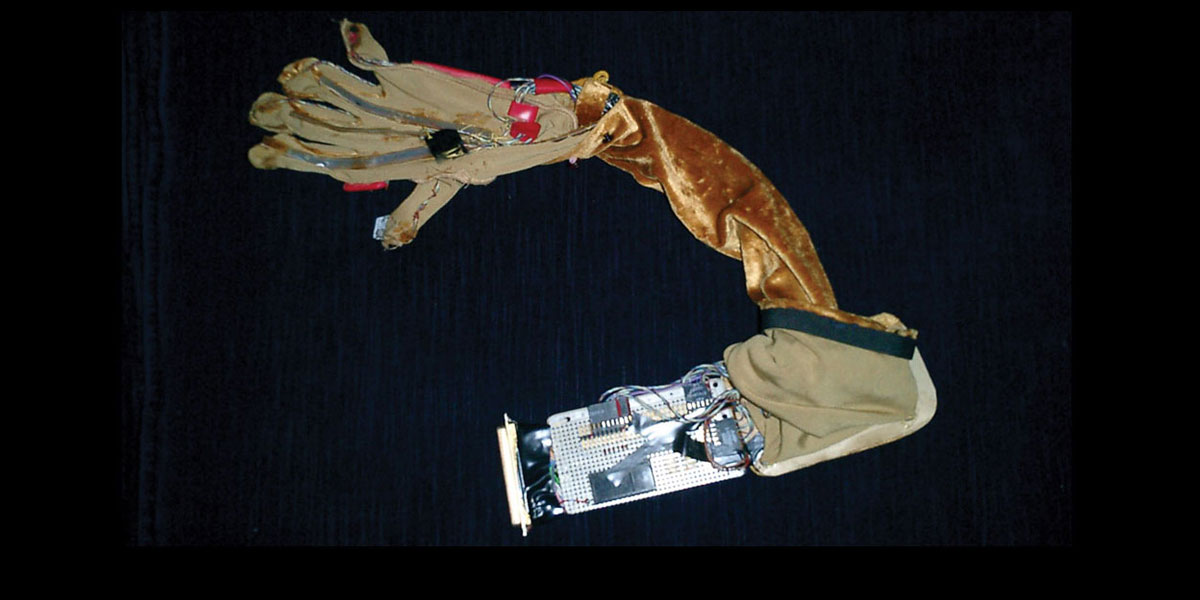
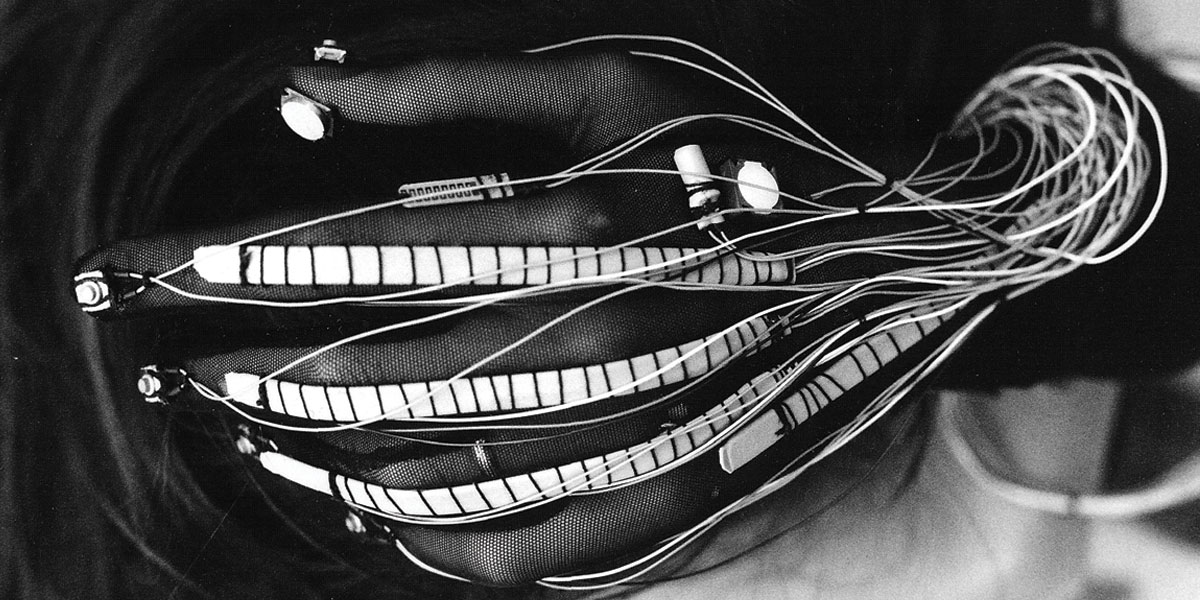
The next glove, no.3 became more glamorous. It was made of golden lycra. It had resistive strips (bend sensors), stripped from Mattel Toy Co.’s Power Glove sewn along the fingers and wrist. These were tapped at the center which allowed for two streams of data per strip, following the finger’s natural bend. A pressure pad was sewn on the inside of the index finger and an ultrasonic transmitter was sewn on the inside palm, with one receiver located on the right arm and one on the left foot: these sensors calculated the distance between both hands and the height of the left hand from the ground. The goal was to interpret the gestures differently based on the distance of the hand to the body and ground. All these signals were fed into STEIM’s Sensorlab. Again, all wires were meant to be hidden in the glove.
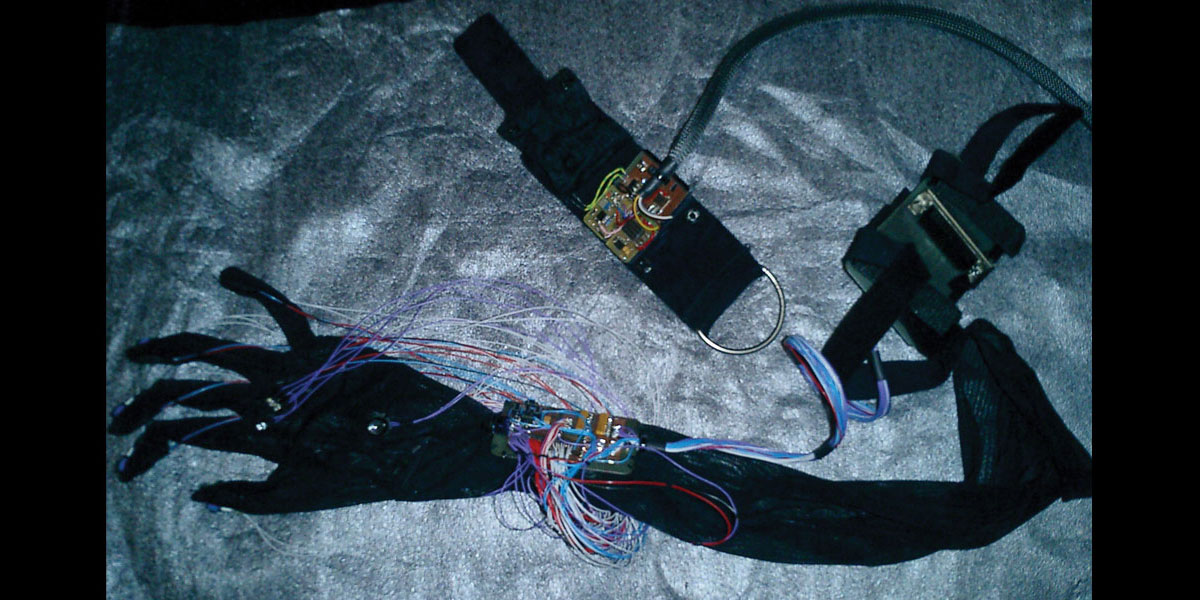
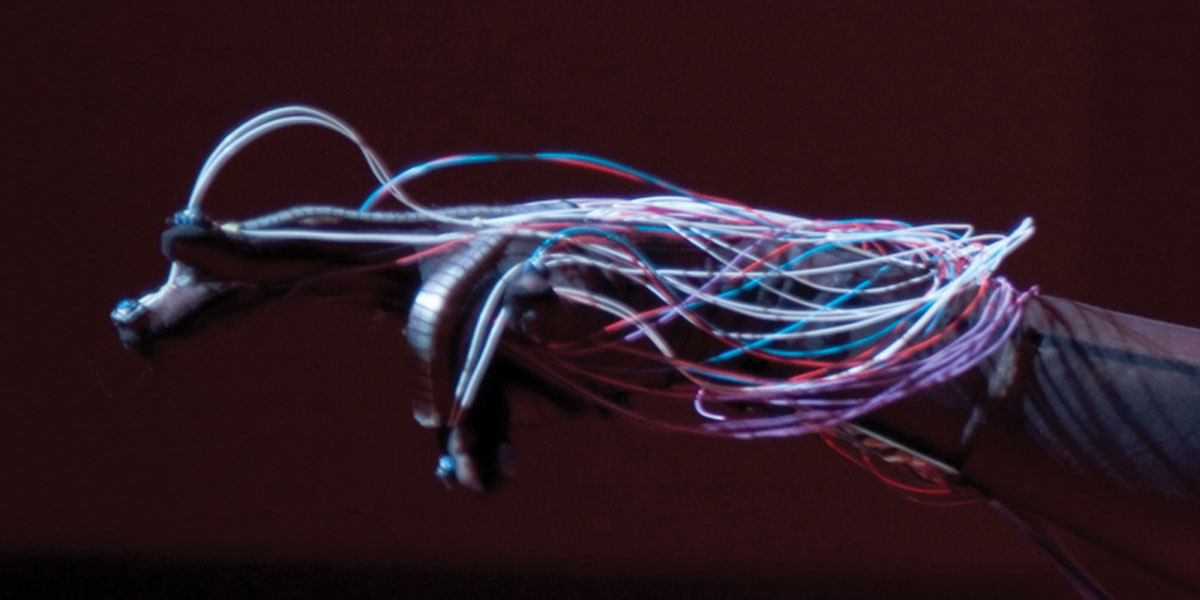
lady’s gloves no. 4 and no. 5
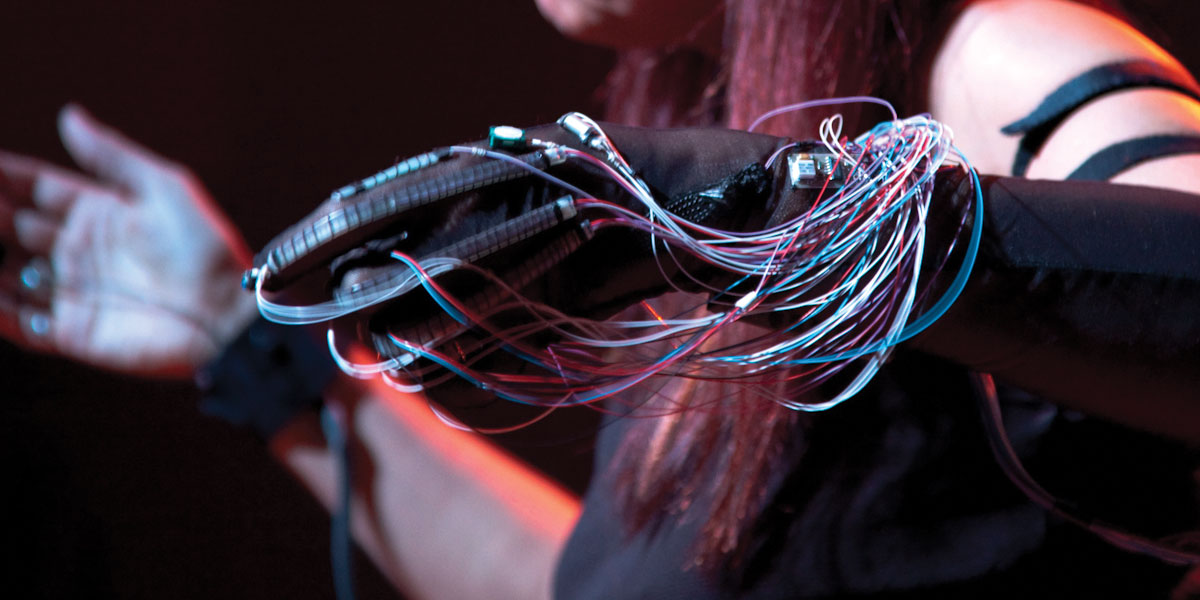
The two subsequent lady’s gloves were built by Bert Bongers in Den Haag, Holland, in 1994 and around 2001 and sponsored by STEIM Institute, Amsterdam. They followed the design of glove no.3 but the look and performance were greatly enhanced by Bert. The same sensors are sewn on the top of a thin black mesh, arm-length, lycra glove tailored in Paris. The glove can be covered if desired, by other gloves of various colors and fine patterns to match one’s cloths and moods (a cross between Liz Taylor and Michael Jackson.. but then i ended up never covering them so fine was Bert’s job). Added to the five microswitches, four Hall effect transducers, pressure pad, resistive strips and two ultrasonic receivers are a mercury switch on the top of the hand and an accelerometer which measures the speed of motion of the hand. No.5 saw the addition of two accelerometers on a right wrist band, some more hall effects, light sensor, extra switches, leds and more recently a miniature mic.)
The signals still go through STEIM’s Sensorlab and are mapped onto MAX-MSP software. The mapping and sonic material changes in each composition. While the signals mostly control sound parameters and processes, they sometimes control motors, light bulbs and/or video (jitter).
The intention in building such a glove was to allow movement without spatial reference, and most importantly to allow for multiple, simultaneous controls. The sounds are now “embodied,” the controls intuitive, and the performance fluid. It has become a fine instrument.
- 1998 Steim Archive: Interview and Demo of the lady’s glove
- Archival Footage from the 90’s
- Roulette 2000 Performance with the lady’s glove and interview
 Previous Project
Previous Project Next Project
Next Project
- Categories:
- Share:
Previous ProjectNext Project